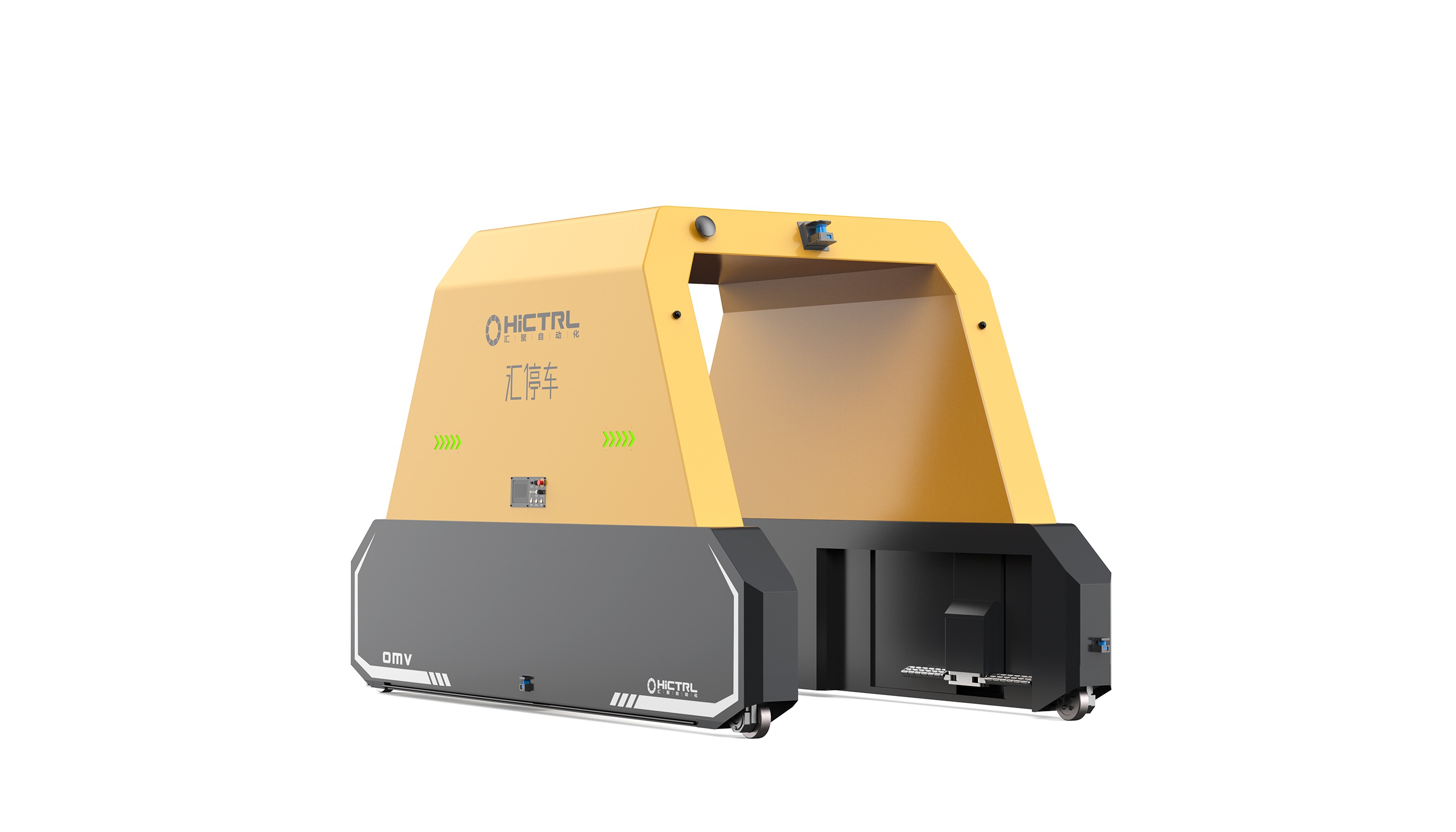
双层停车机器人最大载重3.3吨,最快行驶速度可达每秒1.5 米,应用汇聚自有控制技术,让机器人安全有序的完成轿车的搬运工作。机器人配合调度管理系统,实现车辆搬运的智能化与柔性化,让停车具有更高的适应性与灵活性。
DETAILED+叶片自动打磨机器人,根据系统对叶片进行自动打磨作业
文章来源:汇聚OMV 浏览次数:1443次
汇聚自动化与湖南罗博普仑智能装备有限公司签署的激光导航自动化打磨机器人项目,打破人工驾驶的地轨式打磨移动机器人,利用麦克纳姆轮技术,搭载激光自动导航系统,开发了无轨风能发电机叶片自动打磨的移动机器人,配合打磨机器人系统,根据系统指令配合机器人打磨系统对叶片进行自动打磨作业。
核心特点
1、自动导引:通过激光导航方式,可根据规划好的路径自动导引运行;
2、全向移动:利用麦克纳姆轮,四轮独立驱动技术,满足前进、后退、自转、横移、任意角度斜行等全方位移动;运行速度最大1m/s,能越过高度差为10mm的障碍,能通过30mm宽的沟槽;
4、避障功能:通过布置在车头两个角的两个激光传感器,每个传感器的扫描范围为270°,检测距离1m,扫描到障碍物后全向车自动停止运行;另外在车头尾两侧装有柔性安全触边防撞机构;
5、载重定制:通过麦克纳姆轮轮组的大小、数量的搭配,设计定制承载重量,此项目额定载重4T。
核心特点
1、自动导引:通过激光导航方式,可根据规划好的路径自动导引运行;
2、全向移动:利用麦克纳姆轮,四轮独立驱动技术,满足前进、后退、自转、横移、任意角度斜行等全方位移动;运行速度最大1m/s,能越过高度差为10mm的障碍,能通过30mm宽的沟槽;

4、避障功能:通过布置在车头两个角的两个激光传感器,每个传感器的扫描范围为270°,检测距离1m,扫描到障碍物后全向车自动停止运行;另外在车头尾两侧装有柔性安全触边防撞机构;
5、载重定制:通过麦克纳姆轮轮组的大小、数量的搭配,设计定制承载重量,此项目额定载重4T。
注:此文章由小编撰写,如有用词不当,可联系修改或删除。
推荐产品