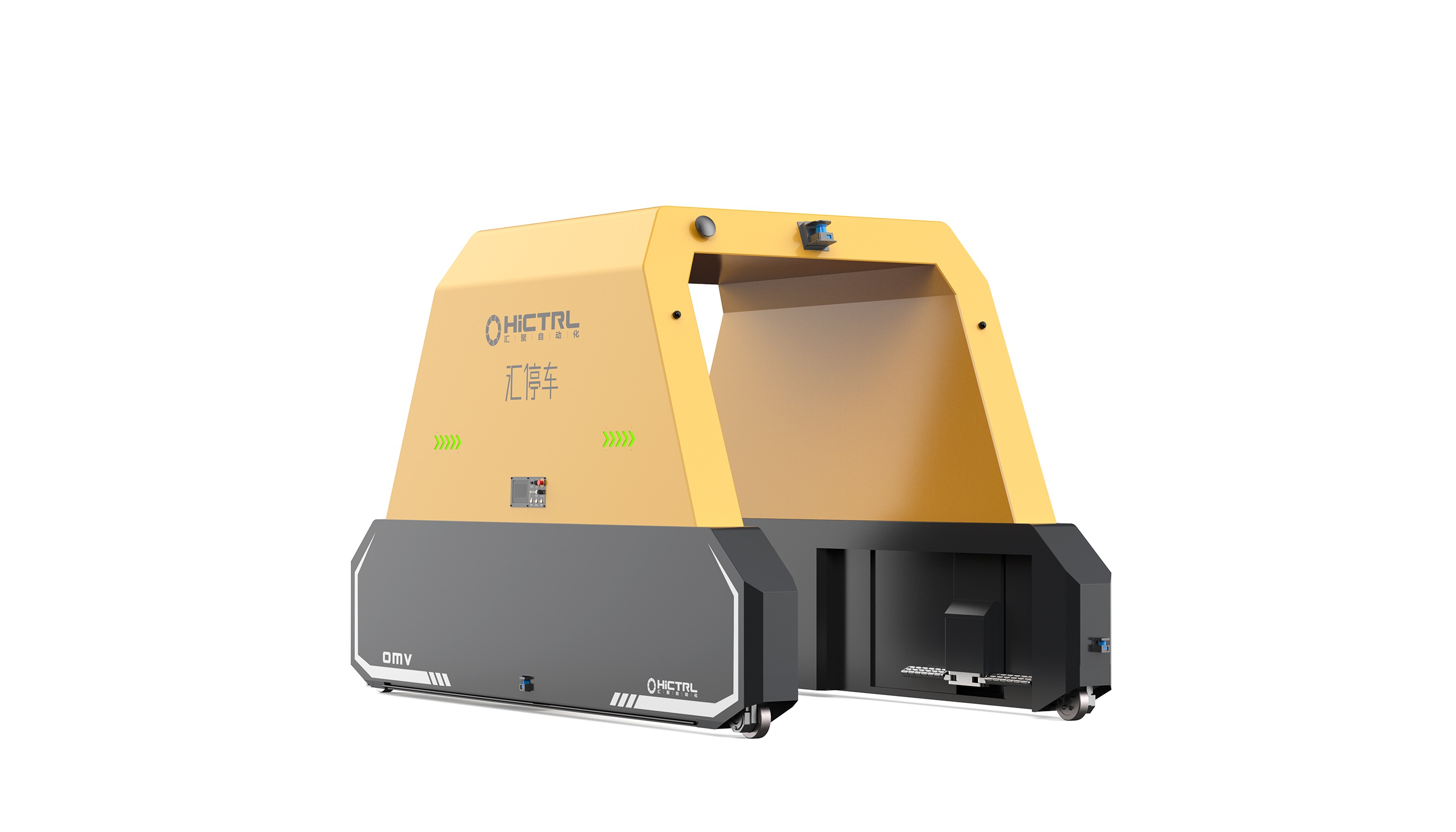
双层停车机器人最大载重3.3吨,最快行驶速度可达每秒1.5 米,应用汇聚自有控制技术,让机器人安全有序的完成轿车的搬运工作。机器人配合调度管理系统,实现车辆搬运的智能化与柔性化,让停车具有更高的适应性与灵活性。
DETAILED+汇聚OMV移动机器人的轮系拓展应用
文章来源:汇聚OMV 浏览次数:1682次
在移动机器人的实际应用中,随着计算机技术、控制技术及通信技术的发展完善,其可靠性、灵活性、安全性和智能化水平已大为提高,目前被广泛应用于机械加工装配、电子工业、仓库储存、办公自动化以及码头、机场、医院、商店等。
在生产过程中,针对不同的性能要求,自动导引车(AGV)需要采用不同轮系结构,从功能上讲,常用的轮系结构基本上可以分为两类:普通轮系(差速轮、舵轮)和全方位轮系(麦克纳姆轮)。
舵轮AGV:舵轮是指集成了驱动电机、转向电机、减速机等一体化的机械结构,通过跟车体作相对运动来控制转向,所以在安装了2个以及以上的舵轮的情况下,车子可以沿任意方向直行,也就是平移。
全方位轮系
麦克纳姆轮是基于一个有许多位于机轮周边的轮轴的中心轮的原理上,这些成角度的周边轮轴把一部分的机轮转向力转化到一个机轮法向力上面。麦克纳姆轮外形像一个斜齿轮,轮齿是能够转动的鼓形辊子,辊子的轴线与轮的轴线成α角度。辊子有三个自由度,在绕自身转动的同时又能绕车轴转动,还能绕辊子与地面接触点的转动。麦克纳姆轮具有灵活、精确、高效的特点,是一种可以控制的全方位轮。
在生产过程中,针对不同的性能要求,自动导引车(AGV)需要采用不同轮系结构,从功能上讲,常用的轮系结构基本上可以分为两类:普通轮系(差速轮、舵轮)和全方位轮系(麦克纳姆轮)。


舵轮AGV:舵轮是指集成了驱动电机、转向电机、减速机等一体化的机械结构,通过跟车体作相对运动来控制转向,所以在安装了2个以及以上的舵轮的情况下,车子可以沿任意方向直行,也就是平移。

全方位轮系
麦克纳姆轮是基于一个有许多位于机轮周边的轮轴的中心轮的原理上,这些成角度的周边轮轴把一部分的机轮转向力转化到一个机轮法向力上面。麦克纳姆轮外形像一个斜齿轮,轮齿是能够转动的鼓形辊子,辊子的轴线与轮的轴线成α角度。辊子有三个自由度,在绕自身转动的同时又能绕车轴转动,还能绕辊子与地面接触点的转动。麦克纳姆轮具有灵活、精确、高效的特点,是一种可以控制的全方位轮。

- 上一个: 自动停车机器人让新手秒变老司机
- 下一个: 智能仓储系统方案助力室内物流“柔性”升级
推荐产品