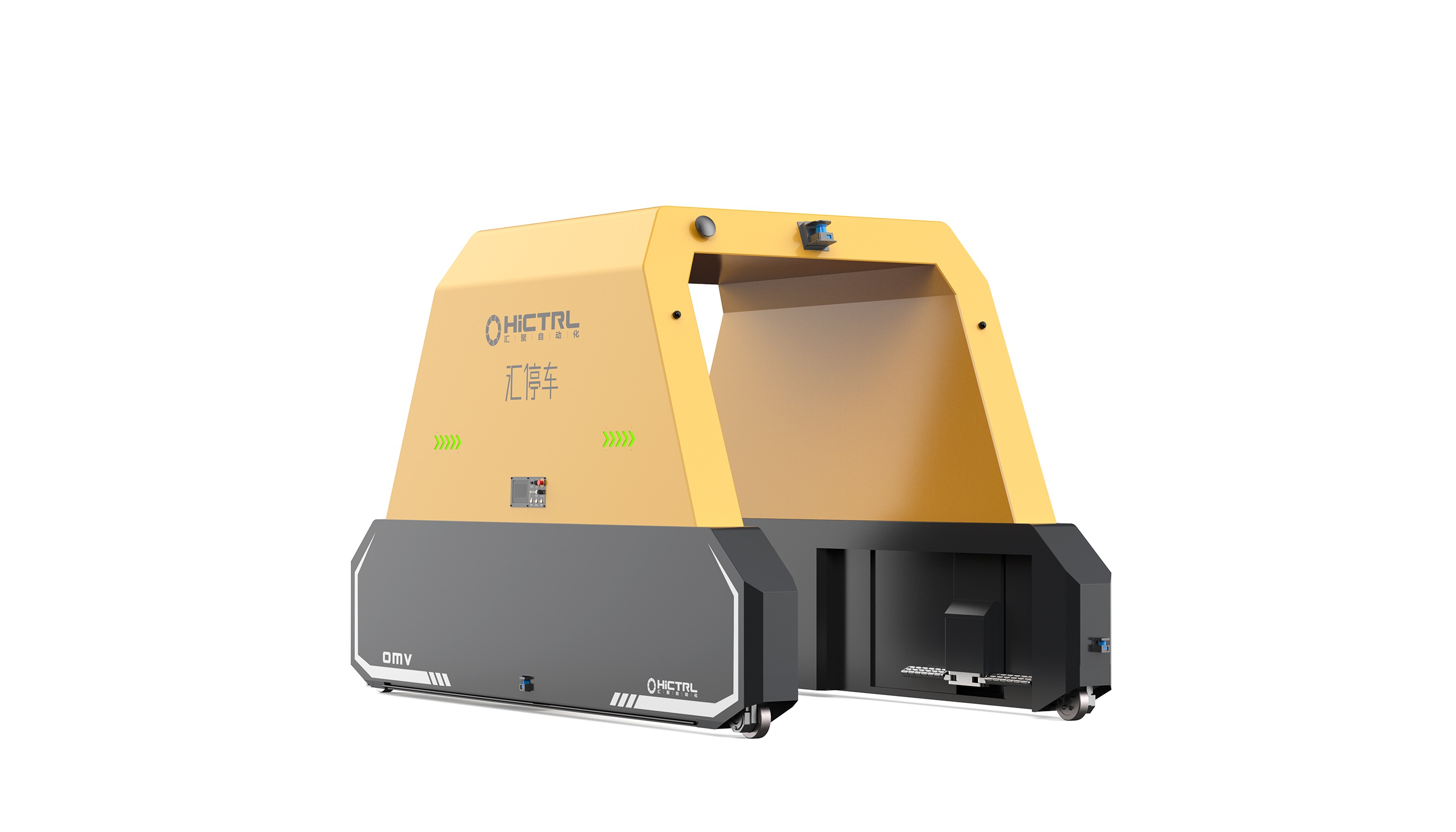
双层停车机器人最大载重3.3吨,最快行驶速度可达每秒1.5 米,应用汇聚自有控制技术,让机器人安全有序的完成轿车的搬运工作。机器人配合调度管理系统,实现车辆搬运的智能化与柔性化,让停车具有更高的适应性与灵活性。
DETAILED+麦克纳姆轮车如何实现全向移动
文章来源:汇聚OMV 浏览次数:2691次
近年来,由德国提出的“工业4.0”概念不断升温,并迅速在全球引发了呼应,“中国制造2025”“智能制造”“柔性生产”“物流自动化”等相关概念也应运而生。越来越多的生产自动化中开始用到AGV。市场需求的不断扩大促进了AGV行业的繁荣,但任何事物都有其两面性,伴随着繁荣而来的,还有企业盲目的一哄而上所导致的产品同质化问题越来越严重。为显示其独特性,当前AGV机器人的技术差异化路线也呈现出了更多的特点,其中麦克纳姆轮车由于特有的技术风格备受关注,而上海汇聚自动化科技有限公司正是这一路线的实践者。
2013年,汇聚基于麦克纳姆轮全向移动的算法调试成功,到现在,技术已经相当成熟,汇聚OMV设备,车轮全部采用的是麦克纳姆轮,具有四轮独立驱动,精密微动,精准定位等特点,可以在无需装配车轮转向装置下实现车体的直行、侧移、斜行、自转等全方位移动。
相对于传统AGV的运动形式,麦克纳姆轮无论是在驱动方式、精度保证,还是在自动寻迹、爬坡越障能力上都要具备更优的竞争优势。
目前,在仓储物流自动化领域,汇聚的OMV麦克纳姆轮车产品有背负式堆垛车、辊筒式产线搬运机器人、电动托盘搬运机器人、电动托盘堆垛机器人、智能前移式叉车、多功能平衡重车、牵引式机器人、潜伏背负式转运机器人等,基本上适用于各种不用的场景。值得一提的是,汇聚自动化在停车机器人运动部分采用的也是麦克纳姆轮,将OMV的全向运动优势发挥到停车机器人上,提升自动停车的效率。
2013年,汇聚基于麦克纳姆轮全向移动的算法调试成功,到现在,技术已经相当成熟,汇聚OMV设备,车轮全部采用的是麦克纳姆轮,具有四轮独立驱动,精密微动,精准定位等特点,可以在无需装配车轮转向装置下实现车体的直行、侧移、斜行、自转等全方位移动。
相对于传统AGV的运动形式,麦克纳姆轮无论是在驱动方式、精度保证,还是在自动寻迹、爬坡越障能力上都要具备更优的竞争优势。

目前,在仓储物流自动化领域,汇聚的OMV麦克纳姆轮车产品有背负式堆垛车、辊筒式产线搬运机器人、电动托盘搬运机器人、电动托盘堆垛机器人、智能前移式叉车、多功能平衡重车、牵引式机器人、潜伏背负式转运机器人等,基本上适用于各种不用的场景。值得一提的是,汇聚自动化在停车机器人运动部分采用的也是麦克纳姆轮,将OMV的全向运动优势发挥到停车机器人上,提升自动停车的效率。
- 上一个: 智能停车机器人帮您停车,省心了
- 下一个: 麦克纳姆轮车让移动如此“随心所欲”
推荐产品