差速背负式机器人(80T)
分类:非标定制OMV设备
行业:搬运/装卸货|储能|其他
轮系:四差速轮组
载重:8001+
导航方式:二维码导航|色带导航







1.采用背负承载式和双差速结构设计,配有顶升系统,额定承载可达80000kg,自重27600kg。
2.行走采用8组差速轮的方式进行驱动,驱动电机采用伺服电机,2个为一组驱动单元,载重大;8差速轮通过运动控制可实现前进、后退、横移、自旋、绕任一点自旋等运动形式。
3.运行方式为手动和自动,自动方式为二维码导航和调度系统以实现自动运行,运行精度可达±20mm,定位精度可达±10mm,节省人力,加快作业效率。
4.车体安装有非接触式避障传感器,安全触边以及急停按钮应急保护措施。
5.采用声光报警,即可提示设备状态又可警示工人作业安全。
全向移动
颠覆传统

超高精度

零回转半径

多种导航
遥控操作

无人操控

远程管理
| 序号 | 项目 | 单位 | 设计值 | ||
| 整 机 特 性 | 1 | 产品型号 | CJ800 | ||
| 2 | 动力形式 | 电动 | |||
| 3 | 操作方式 | 自动/遥控 | |||
| 4 | 额定载荷 | kg | 80000 | ||
| 5 | 自重(含蓄电池) | kg | 27600 | ||
| 6 | 行车制动 | 电磁 | |||
| 7 | 驱动类型 | 差速驱动 | |||
| 8 | 驱动轮数量 | psc | 16 | ||
| 尺 寸 参 数 | 9 | 作业时最大高度 | mm | 1040 | |
| 10 | 最大提升高度(行程) | mm | 140 | ||
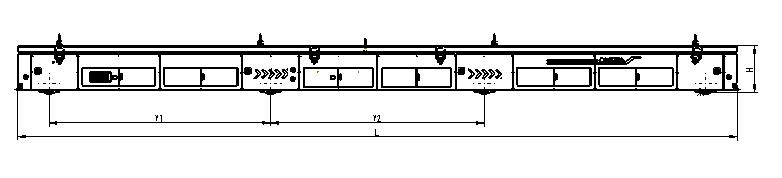
| 11 | 全长(不含安全触边) | L | mm | 13800 | |
| 12 | 全宽(不含安全触边) | W | mm | 2100 | |
| 13 | 全高 | H | mm | 900 | |
| 14 | 轴中心距 | mm | 1040 | ||
| 15 | 轴距 | Y1/Y2 | mm | 4250/4100 | |
| 16 | 车轮尺寸 | mm | 400 | ||
| 17 | 最小离地间隙 | mm | 80 | ||
| 性 能 参 数 | 18 | 最大前进速度(空载/满载) | m/s | 2 | |
| 19 | 最大后退速度(空载/满载) | m/s | 2 | ||
| 20 | 最大起升速度(空载/满载) | mm/s | 5 | ||
| 21 | 最大爬坡度(空载/满载) | % | 2% | ||
| 22 | 整车对角尺寸 | mm | 13960 | ||
| 23 | 运行精度 | mm | ±20 | ||
| 24 | 定位精度 | mm | ±10 | ||
| 25 | 工作时长 | h | 5 | ||
动 力 | 26 | 蓄电池电压/容量 | V/Ah | 96/525 | |
| 27 | 蓄电池重量 | kg | 550 | ||
| 28 | 电机(直流)驱动电机 | kw | 32 | ||
| 29 | 电机(直流)起升电机 | kw | 10 | ||
| 30 | 电机(直流)转向电机 | kw | 无 | ||
| 控制 | 31 | 控制器 | hictrl | ||
| 其它 | 32 | 噪音 | ≤75 |
相关产品

 产品咨询
产品咨询
 产品视频
产品视频










